Prithwish Dan
pd337@cornell.edu

M.S. Student
Cornell University
I am in the final year of my Computer Science M.S. at Cornell University, advised by Professors Sanjiban Choudhury and Wei-Chiu Ma. After graduation in May 2026, I will be entering the job market for industry research roles. Feel free to reach out!
I work on training robotic agents from human demonstrations in everyday environments. My research interests span learning from human videos, imitation learning (IL), reinforcement learning (RL), and sim-to-real, which I believe serve as the scalable pathways towards learning general purpose robot skills.
Additionally, I was an ML Research Intern @ Apple, and have prior internship experience as a Software Engineering Intern @ MongoDB.
In my free time, I enjoy Chinese Yo-Yo’ing and dancing.
Link to CV.
News
| Aug 2025 | X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-Real was accepted to CoRL 2025 for an Oral Presentation, and received Best Paper Finalist at EgoAct @ RSS2025! We learn robot actions from action-less human videos using an object-centric reward in simulation, generating synthetic data for real policies. |
|---|---|
| Jan 2025 | One-Shot Imitation under Mismatched Execution was accepted to ICRA 2025! We enable one-shot imitation of human videos with mismatches in embodiment and execution. |
| May 2024 | MOSAIC: A Modular System for Assistive and Interactive Cooking won best paper at VLMNM workshop and best poster at MoMa workshop at ICRA 2024! It was also accepted to CoRL 2024. We combine multiple foundation models to design a multi-robot collaborative cooking system. |
| Mar 2024 | I received the Merrill Presidential Scholar award which honors Top 1% of all Cornell undergraduates in academic achievement and leadership! |
| Jan 2024 | InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot Actions was accepted to ICRA 2024! We predict human intent conditioned on future robot actions to enable collaborative manipulation. |
| Dec 2023 | I received the CRA Outstanding Undergraduate Researcher (Honorable Mention) for graduating Class of 2024! |
| Sep 2023 | Excited to release the Collaborative Manipulation Dataset (CoMaD)! CoMaD captures over 6 hours of motion data from 14 unique users involving both human-human and human-robot (Franka robot arm) interactions in a kitchen setting. |
| Aug 2023 | ManiCast: Collaborative Manipulation with Cost-Aware Human Forecasting was accepted to CoRL 2023! We learn cost-aware human motion forecasts and plan with them for safe human-robot collaboration. |
| May 2023 | A Game-Theoretic Framework for Joint Forecasting and Planning was accepted to IROS 2023. We frame forecasting and planning as an adversarial game, leading to safer interactions. |
Publications
-
 X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-RealOral Presentation - CoRL 2025
X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-RealOral Presentation - CoRL 2025 -
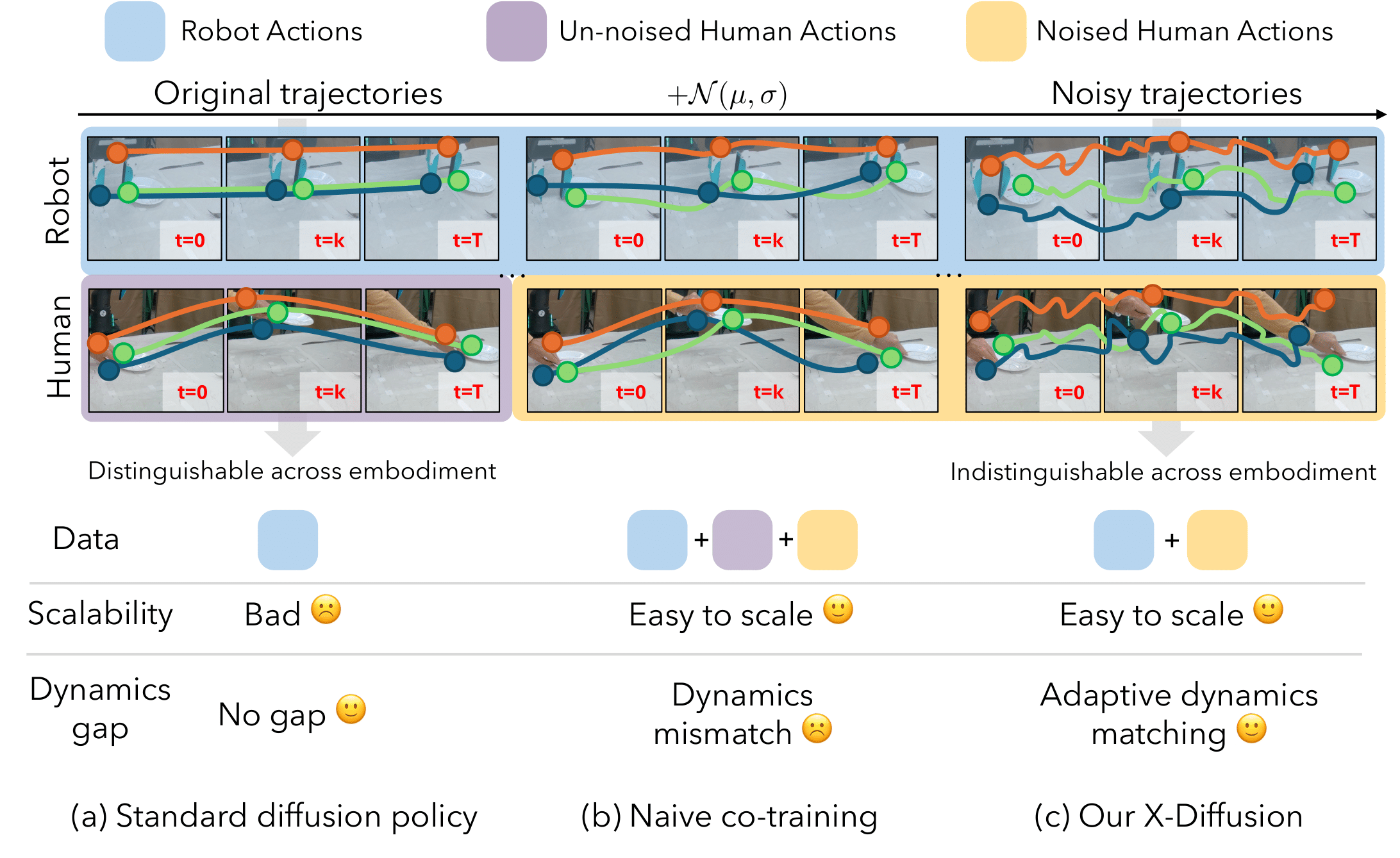 X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human DemonstrationsIn Submission
X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human DemonstrationsIn Submission -
-
-
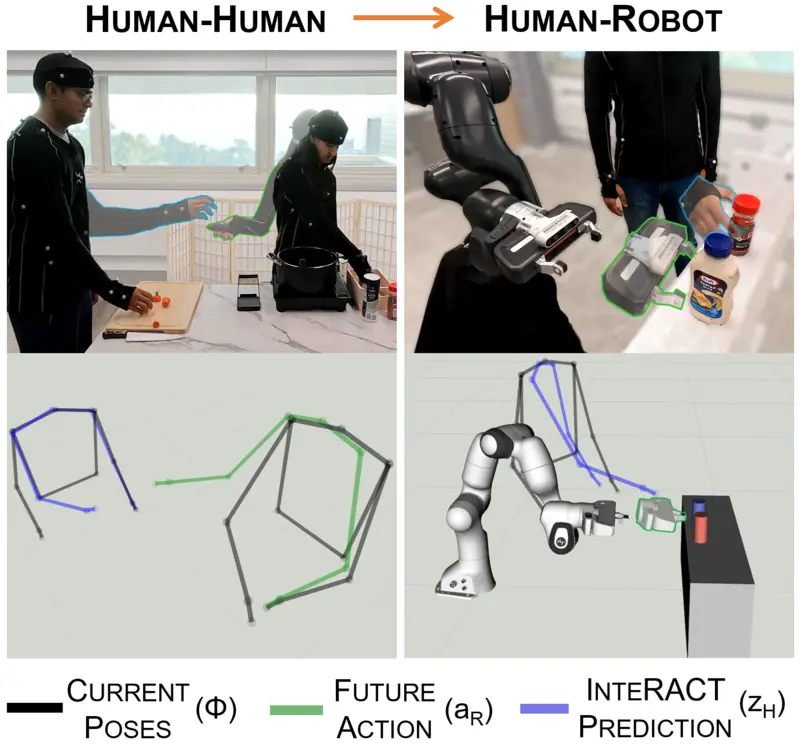 InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot ActionsICRA 2024
InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot ActionsICRA 2024 -
 ManiCast: Collaborative Manipulation with Cost-Aware Human ForecastingCoRL 2023
ManiCast: Collaborative Manipulation with Cost-Aware Human ForecastingCoRL 2023 -